![]()
![]()
![]()
![]()
Rough Terrain Autonomous Vehicle
This is an interdisciplinary team project. A group of 4~7 senior students with ME, ECE and Engineering Management majors work together to design and build an autonomous vehicle using robotics techniques and GPS. This vehicle will be able to move autonomously and detect and avoid obstacles it encounters along its path. The vehicle's size, weight and functionalities are developed based on the rules speculated by the Association for Unmanned Vehicle Systems International. The goal of this project is to compete in the Annual Intelligent Ground Vehicle Competition (IGVC). This project is collaborated with Dr. Orlando Hernandez.
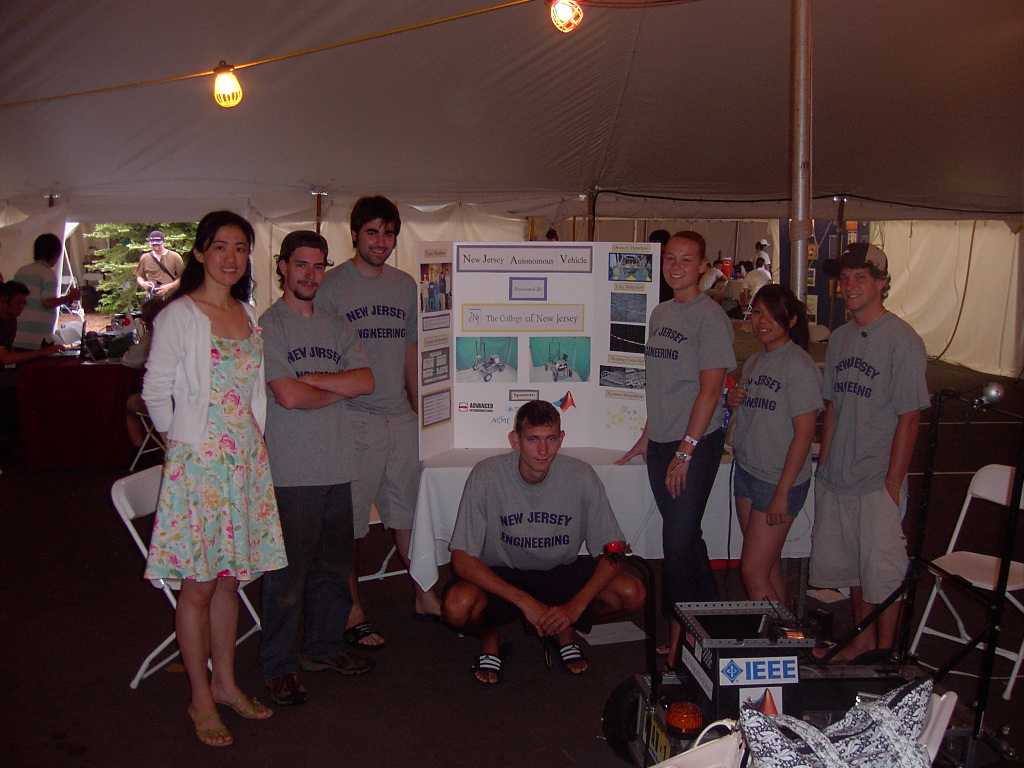
Team 2005 in the 13th IGVC (Travese City, MI, June 2005)